
The Gait Cycle in Running
Part II: Viscous-Spring-Dampeners
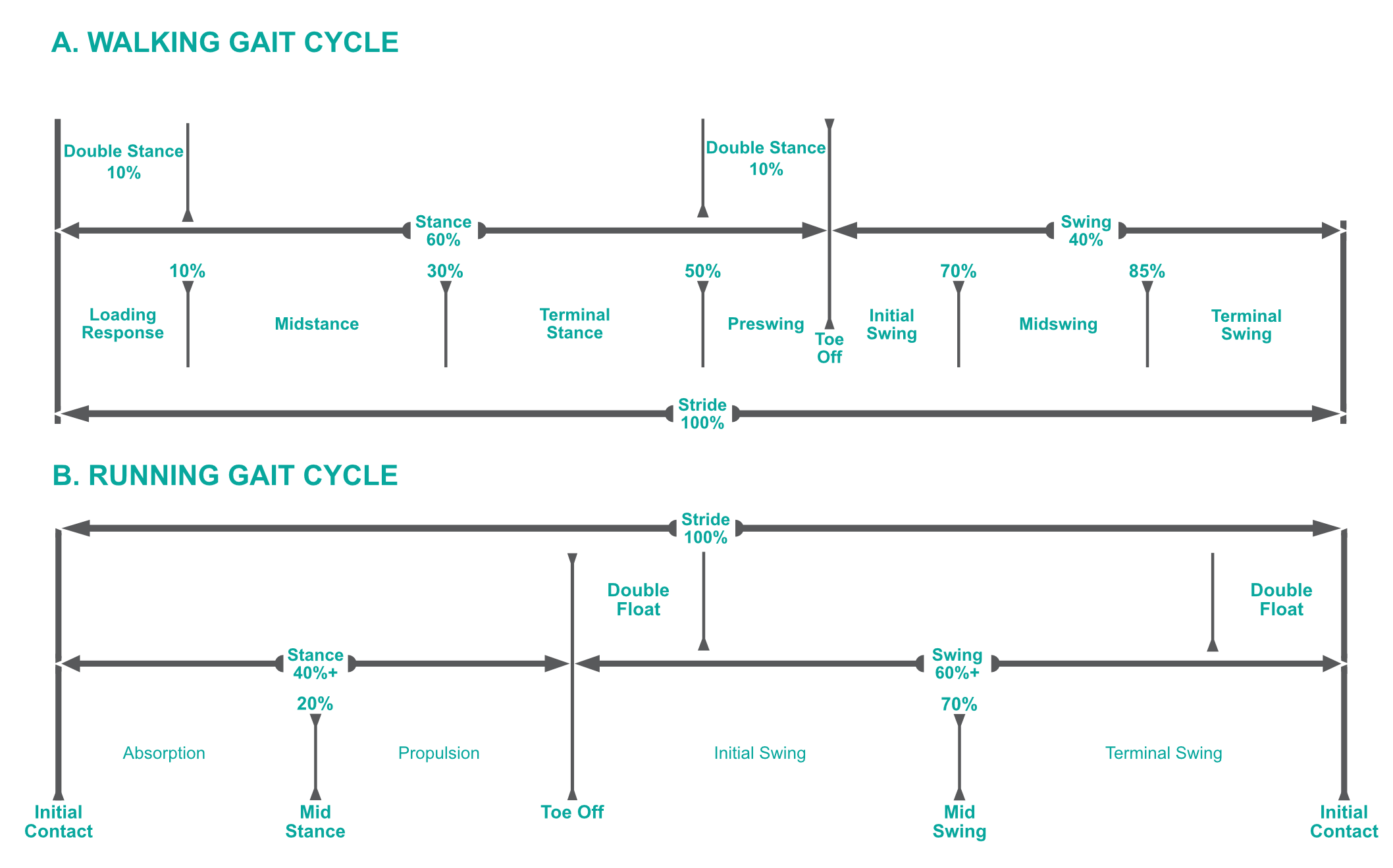
 The gait cycle in running is not like walking because it has a float phase after the terminal stance phase when neither foot is on the ground. The leading foot is completing its swing phase but is still swinging when the terminal stance phase completes and the foot leaves the ground on the trailing leg. How long the float phase lasts depends on running speed. The faster you run the longer the float phase and the shorter the stance phase of gait becomes, ad the shorter a complete stride lasts.
The gait cycle in running is not like walking because it has a float phase after the terminal stance phase when neither foot is on the ground. The leading foot is completing its swing phase but is still swinging when the terminal stance phase completes and the foot leaves the ground on the trailing leg. How long the float phase lasts depends on running speed. The faster you run the longer the float phase and the shorter the stance phase of gait becomes, ad the shorter a complete stride lasts.
Classically, in walking stance phase is said to last around 60% of gait and swing 40%. In running this commonly reverses to around 40% stance and 60% swing, but in sprinting stance can be even less %. What limits running speed is not the time we spend in the stance phase, but the time necessary to swing the leg forward to the next step. Human morphology means that despite fantasy characters like “The Flash”, humans are never going to outrun a horse or an ostrich, and the present 100m record is unlikely to be beaten by much in the future. Athletes who wish to break this record need to work most on their swing phase mechanics/strength, rather than their stance phase.
Not only does running speed affect running gait cycles, but so does the foot contact position. These can be a heel strike, a midfoot (total foot strike), a forefoot strike and an extreme forefoot strike (forward of metatarsal heads to toes). In this article, we don’t have the space to discuss this in detail, but if there is interest we’ll do an article for you later (email and let us know).
The main difference resulting from initial contact positions is in which muscles have use activity to absorb impact energy through stretch-shortening cycles at initial contact, with heel strikes using anterior ankle muscles, and forefoot strikes using posterior ankle muscles, increasing the risk of overuse injuries in one or the other. The faster we run, the more likely we are to forefoot strike, but the evidence is not supportive of one being the ‘only’ way we evolved to run as habitual-childhood barefoot runners are more likely to heel strike at fast running speeds than habitually shod runners made to run barefoot. Again this is a subject for another occasion.
Both running and walking involve impacts, but running impacts are higher. Mass X acceleration makes force, so the forces put on the body during running are higher because acceleration is higher. Loading rate and peak loads of force are therefore increased with running. The connective soft tissues in humans behave more stiffly and elastically the faster they are loaded. In normal circumstances then, our tissues are stiffer and behave more elastically on running than walking. Initial contact (wherever that is on the foot) in running involves a breaking phase, then an acceleration phase, but the foot no longer works as a base for the vaulting of the leg over the ankle like a pendulum as in walking. Instead, the whole lower limb now works like a spring-mass.
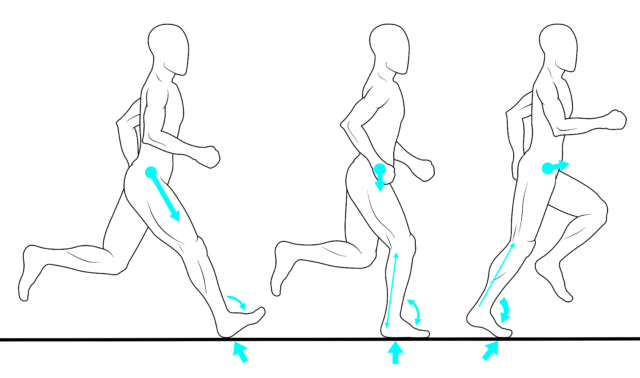
Image a spring with a heavy weight fixed on top. Drop the spring and the mass above deforms the spring under the influence of gravity and acceleration, then it springs back up. That is basically how the leg and the foot works in running, as a viscous-spring-dampener. The hip and knee flex, and the ankle either flexes or extends depending on foot contact position, using active muscles and stiff connective tissues that deform by stretching, store elastic energy then spring back up after breaking of the impact energy is complete. This involves more muscle activity than in walking which is why we are less energy-efficient at running than walking.
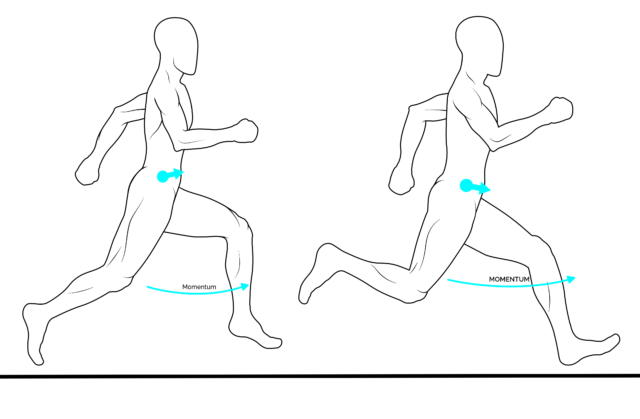
The swing phase is very important in helping to draw the body’s centre of mass forward and upwards in running, and the leg is swinging faster in running to achieve the momentum necessary to draw the body along behind it. This increases the horizontal force necessary to increase speed and means less energy is used to spring the body back up after impact. We want to go forward in running, not upwards like in jumping.
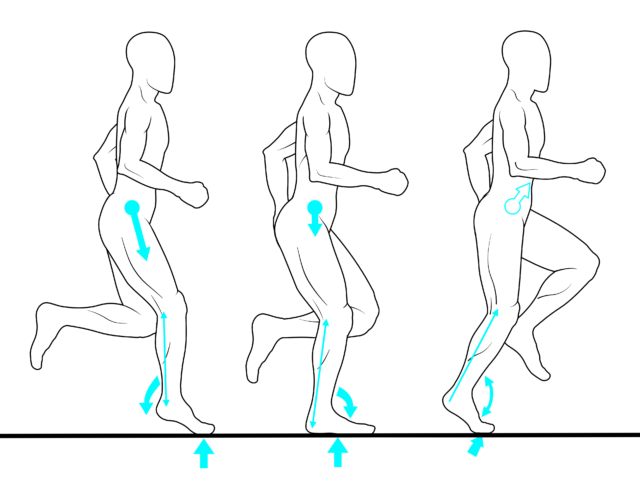
So the gait cycle in running now follows a cycle of stance phase following impact of the CoM falling towards the ground, deforming the spring beneath it (i.e. the lower limb). The CoM will be at its lowest point when the leg-foot spring is most deformed, which is at 50% of the stance phase. In walking the CoM is actually at its highest point around 50% of stance on the extended leg, quite unlike running. In running, after this CoM low point the CoM springs back up through the elastic recoil of the connective tissue, assisted by calf muscle power at the ankle that causes the CoM to start to rise up through terminal stance and float phase.
As the swing leg passes through midswing its momentum draws the CoM forward, so that during the leg-foot elastic recoil on the stance limb the CoM is pulled forward creating a GRF more horizontal (posterior push into the ground), so the spring effect drives the body more forward and less upwards. The stance foot then leaves the ground and enters the float phase when the CoM now reaches its highest point. From here under the influence of the terminal swing leg and gravity, the CoM falls down and forward as the swing leg prepares to impact the ground for a new step cycle to begin.
In summary:
Walking is a vaulting technique much like an inverted pendulum. Running is a spring-mass technique.
In both walking and running the swing limb draws the CoM forward under momentum as it goes into terminal swing phase.
The stance phase of walking involves an impact-braking phase known as initial-contact and loading response. The foot is overall soft tissue compliant during this phase allowing deformation of structures easily. It then passes into a vaulting phase, initially extending the leg and gaining height for the CoM, followed by the CoM falling from its height point drawn forward by the opposite terminal swing leg. Finally, there is a heel-lifting or propulsive or push-off phase where the leg’s CoM is raised to make life easy for the hip to lift the foot and leg off the ground into swing phase as the opposite foot starts its impact-braking action. The push-off foot must be stiff to act as a lever to apply ankle power as a ground reaction force to drive forward on, during terminal stance
In running the foot and leg behaves much stiffer because connective tissues behave stiffer when loaded quickly. Impact-braking phase involves more joint motion allowing muscles to under-go stretch-shortening storing energy within the connective tissues. At the end of braking, the leg is at its shortest, the CoM at its lowest, like a crushed spring. Now the spring recoils elastically sending the CoM back upwards, but the swing leg through momentum draws the upward springing effect in an anterior direction, so the CoM springs more forward than upward. As the stance foot leaves the ground the swing foot has not yet made ground contact, so the runner is now in float phase when neither foot is on the ground.